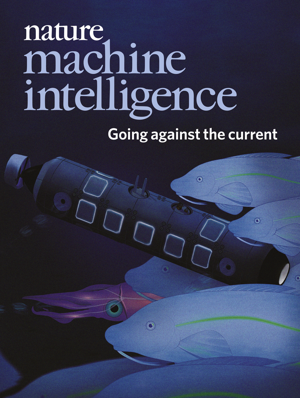
ECE professor Dr. Kamran Mohseni and Kevin Nelson, a graduate assistant in Mohseni’s lab, co-authored an article which appeared on the cover of the journal Nature Machine Intelligence. “Distributed sensing for fluid disturbance compensation and motion control of intelligent robots” appears in the May 2019 issue.
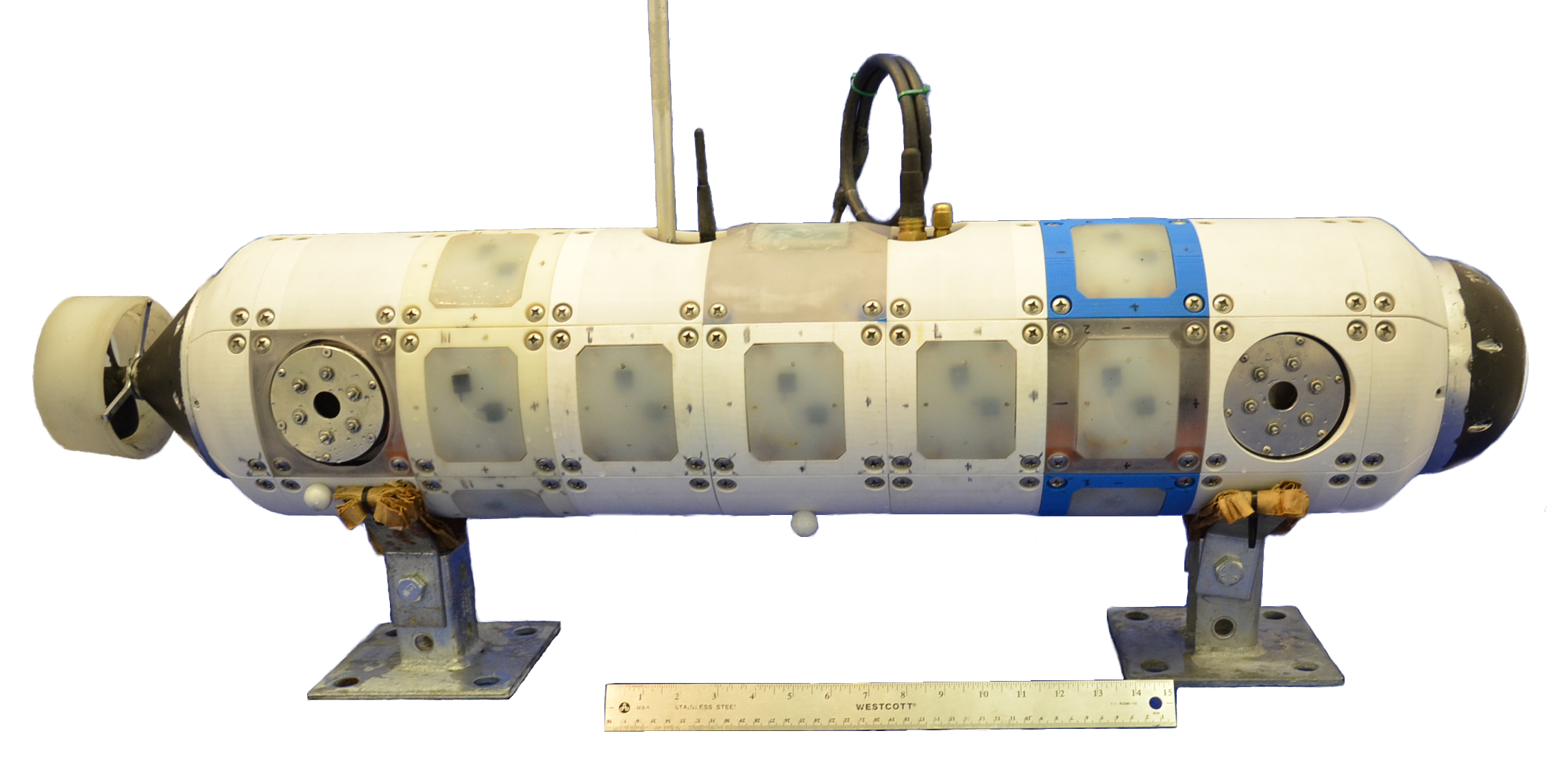 The Mohseni Group’s prototype underwater vehicle uses intelligent, bio-inspired distributed sensing to directly measure the hydrodynamic forces acting on it from the surrounding environment. These forces are directly compensated for, which dramatically reduces position tracking errors. This methodology has been implemented and tested on an in-house developed autonomous underwater vehicle, CephaloBot, and the results show improvement by as much as 72% compared to a standard position error feedback controller.
The Mohseni Group’s prototype underwater vehicle uses intelligent, bio-inspired distributed sensing to directly measure the hydrodynamic forces acting on it from the surrounding environment. These forces are directly compensated for, which dramatically reduces position tracking errors. This methodology has been implemented and tested on an in-house developed autonomous underwater vehicle, CephaloBot, and the results show improvement by as much as 72% compared to a standard position error feedback controller.