 ECE Florida Associate Professor Sanjeev J. Koppal has received $1M in funding from the Office of Naval Research (ONR) in support of his project “Rapid High-Resolution Target Aerial Detection and Tracking through Deep Foveated Imaging.” The project seeks to improve the imaging abilities of unmanned aerial vehicles (UAVs), allowing them to quickly and efficiently detect the areas of interest in a scene. These abilities are of special interest in situations where UAVs (rather than humans) are being used to perform surveillance and reconnaissance. Dr. Koppal’s work seeks to combine machine learning algorithms and bio-inspired cameras to enable UAV vision to behave more like human vision, quickly zooming from one area of interest to the next, automatically intuiting what is salient in a given scene.
ECE Florida Associate Professor Sanjeev J. Koppal has received $1M in funding from the Office of Naval Research (ONR) in support of his project “Rapid High-Resolution Target Aerial Detection and Tracking through Deep Foveated Imaging.” The project seeks to improve the imaging abilities of unmanned aerial vehicles (UAVs), allowing them to quickly and efficiently detect the areas of interest in a scene. These abilities are of special interest in situations where UAVs (rather than humans) are being used to perform surveillance and reconnaissance. Dr. Koppal’s work seeks to combine machine learning algorithms and bio-inspired cameras to enable UAV vision to behave more like human vision, quickly zooming from one area of interest to the next, automatically intuiting what is salient in a given scene.
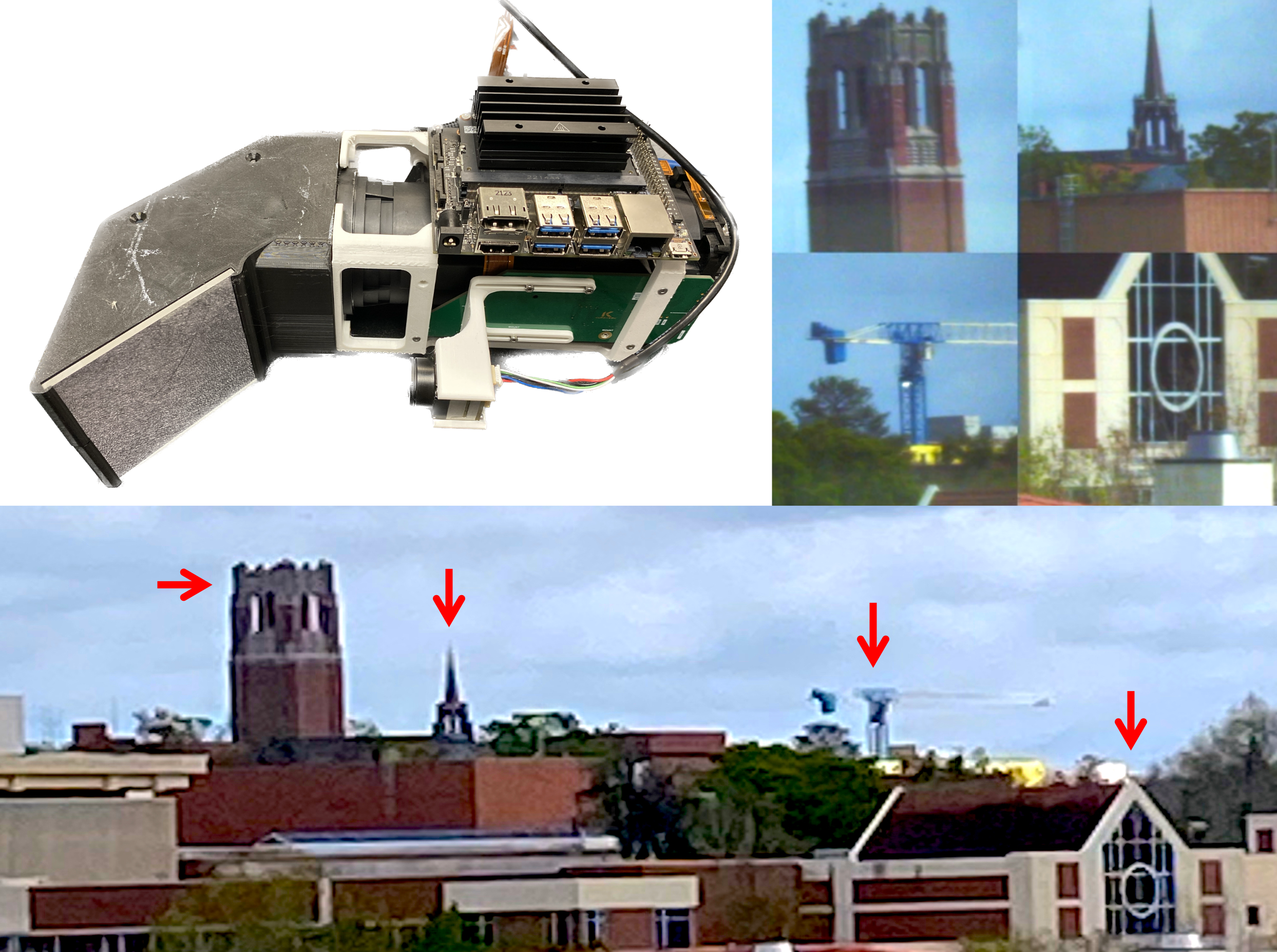
For a UAV running reconnaissance, “zooming in” on an object from above is the best way to monitor a target. However, the process of zooming in by definition dedicates the camera to only one region of interest, ignoring the rest of the scene. Dr. Koppal’s project proposes a bio-inspired foveating camera that servos (or quickly changes) the zoomed area to multiple regions of interest. In addition to the development of the foveating camera, the project will use machine learning algorithms to decide where in a scene to place attention and how to switch between regions of interest.
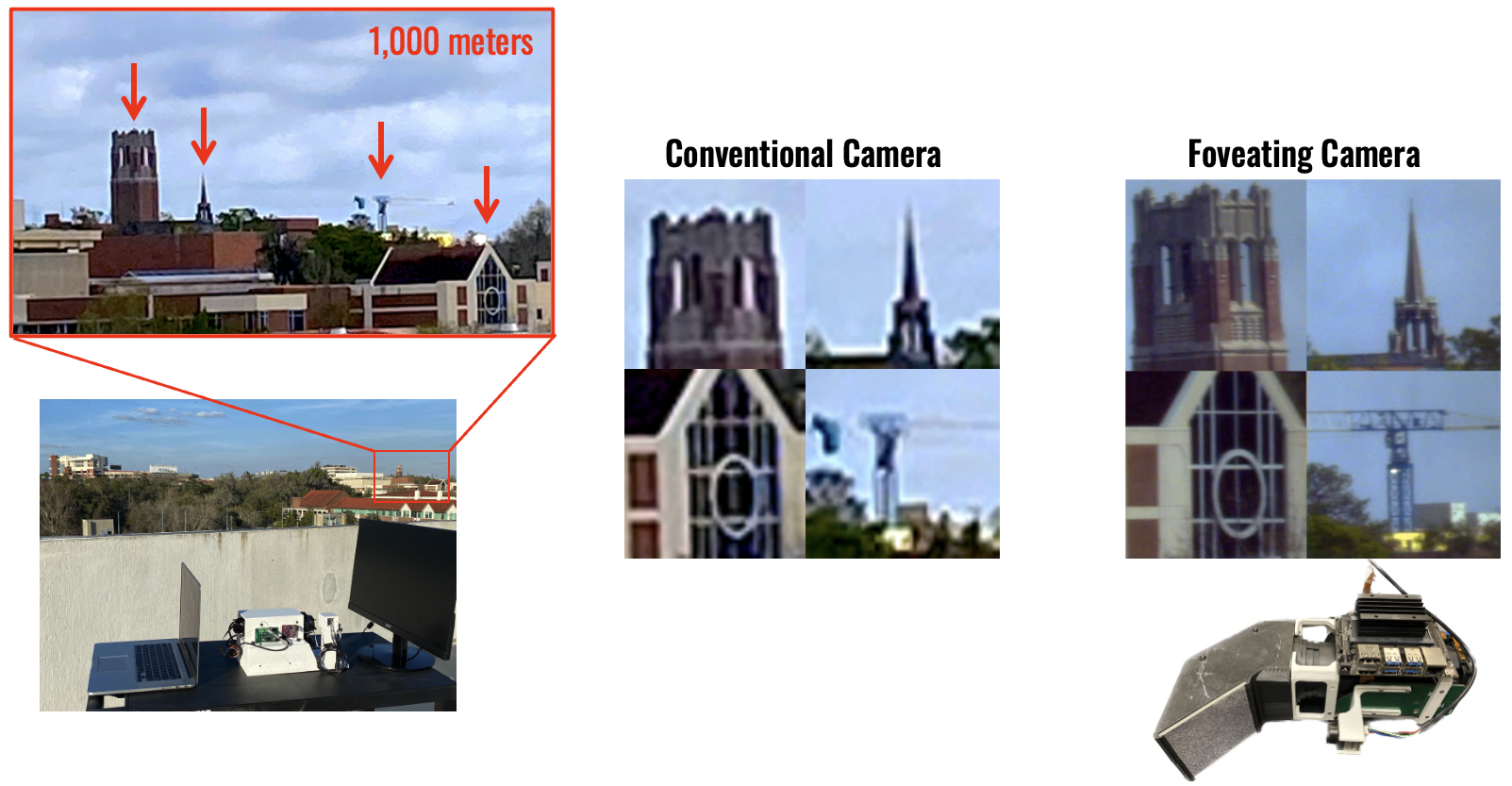
In the image above, the distant area of interest for the foveating camera is bounded by the red box. The actual camera is pictured next to the laptop. The foveating camera can swivel to each red arrow region of interest very quickly, generating four high-resolution images of each region of interest in real time.
The project will cover the entire end-to-end fundamental research and development of foveating cameras for UAV stand-off target ranging, detection and tracking.